

Cell Phone Controlled Land Rover Using Logic Gates
What’s Science for a small child ?At that age, no one of us is aware about the vast branches in science ,yet we are very curious to know.There will be lots of Why’s and How’s in our mind which makes the elders irritated.By seeing a toy car,we always get wondered. Without knowing any robotics or electronics inside we just want to make our own toy car with clay and blocks.So its not wrong to say that every child has scientist inside who’s curious ,Who wants to do!
So here I’m going to discuss to make a toy car or a land rover .Not just a toy car but it’s controllable ,obviously who don’t want to have control over something .So a remote control toy or a land rover .By hearing it, Some may think it’s difficult and can’t be done.But without having any knowledge of microcontrollers or any other processors it can be done using Gate circuit so that even a high school boy with little amount of knowledge in Gates can do it.
Most of the remote control wireless robots are made by the RF circuitry .But it has the drawbacks of limited working range, limited frequency range and limited control .So an alternate method to solve these issues is to make by using DTMF.A cell phone can be used for this purpose .With the help of microcontrollers we can program and implement .But it remains difficult for those who are unaware and don’t have enough knowledge of microcontrollers.
The problem can be solved by using the equivalent logic circuit of the microcontroller .But as we know everything has its pros and cons,there will be a problem of excessive current division due to overloaded logic lines .However it can be solved by using a current amplifier with overloaded lines or by increasing the total current input to the circuit.
The control of the rover involves 3 distinct stages.
- Reception -Sensors mounted on the board
- Processing -Inputs to logic circuit which give corresponding output
- Action -Movement by the motors and actuator
Overview
To activate the rover a call is made to the phone which is attached to the rover itself .The cell phone will be in auto answer mode .If any button is pressed during the call corresponding tone is heard on the other end .This tone is called Dual Tone Multi Frequency ( DTMF) tone .The tone is received by the phone attached to the rover .The received tone is fed onto the logic circuit (Decoder) which converts or decodes the tone corresponding to equivalent BCD codes .The output is fed onto the motor Which decides the motion of the rover according to output of logic circuit.
The logic relation between decoder and motor driver is as shown below :
| DTMF Keys | BCD Codes | Function | Motor Driver Inputs | |||||||
|---|---|---|---|---|---|---|---|---|---|---|
| D3 | D2 | D1 | D0 | EN | 1A | 2A | 3A | 4A | ||
| 1 | 0 | 0 | 0 | 1 | X | X | X | X | X | |
| 2 | 0 | 0 | 1 | 0 | Forward | 1 | 0 | 1 | 1 | 0 |
| 3 | 0 | 0 | 1 | 1 | X | X | X | X | X | |
| 4 | 0 | 1 | 0 | 0 | Left Turn | 1 | 1 | 0 | 1 | 0 |
| 5 | 0 | 1 | 0 | 1 | Brake | 0 | X | X | X | X |
| 6 | 0 | 1 | 1 | 0 | Right Turn | 1 | 0 | 1 | 0 | 1 |
| 7 | 0 | 1 | 1 | 1 | X | X | X | X | X | |
| 8 | 1 | 0 | 0 | 0 | Backward | 1 | 1 | 0 | 0 | 1 |
| 9 | 1 | 0 | 0 | 1 | X | X | X | X | X | |
| 0 | 1 | 0 | 1 | 0 | X | X | X | X | X | |
| * | 1 | 0 | 1 | 1 | X | X | X | X | X | |
| # | 1 | 1 | 0 | 0 | X | X | X | X | X | |
| A | 1 | 1 | 0 | 1 | X | X | X | X | X | |
| B | 1 | 1 | 1 | 0 | X | X | X | X | X | |
| C | 1 | 1 | 1 | 1 | X | X | X | X | X | |
| D | 0 | 0 | 0 | 0 | X | X | X | X | X | |
The logic relation for each input can be found out by solving the K-map as shown below :
1) EN (output enable ) =D0′
| D1′ D0′ | D1′ D0 | D1 D0 | D1 D0′ | |
|---|---|---|---|---|
| D3′ D2′ | X | X | X | 1 |
| D3′ D2 | 1 | 0 | X | 1 |
| D3 D2 | X | X | X | X |
| D3 D2′ | 1 | X | X | X |
If we look the truth table its clear that the for operative’s signals the D0 data line is low ,which should be high and for brake it should below so that all functions stop and rover comes to rest .So the common enable of motor driver is given the signal D0′(compliment of D0).
2) 1A=D1′
| D1′ D0′ | D1′ D0 | D1 D0 | D1 D0′ | |
|---|---|---|---|---|
| D3′ D2′ | X | X | X | 0 |
| D3′ D2 | 1 | X | X | 0 |
| D3 D2 | X | X | X | X |
| D3 D2′ | 1 | X | X | X |
The 1st driver signal is given to motor driver is the compliment of D1 data line.
3) 2A= D1
| D1′ D0′ | D1′ D0 | D1 D0 | D1 D0′ | |
|---|---|---|---|---|
| D3′ D2′ | X | X | X | 1 |
| D3′ D2 | 0 | X | X | 1 |
| D3 D2 | X | X | X | X |
| D3 D2′ | 0 | X | X | X |
The 2nd driver signal to the motor driver is the direct signal of date line D1.
4) 3A=D2’D1+D2D1′ ( D2 X-OR D1)
| D1′ D0′ | D1′ D0 | D1 D0 | D1 D0′ | |
|---|---|---|---|---|
| D3′ D2′ | X | X | X | 1 |
| D3′ D2 | 1 | X | X | 0 |
| D3 D2 | X | X | X | X |
| D3 D2′ | 0 | X | X | X |
The 3rd driver signal to the motor is the XOR the data lines D2 and D1.
5) 4A=D2’D1’+D2D1 ( D2 X-NOR D1)
| D1′ D0′ | D1′ D0 | D1 D0 | D1 D0′ | |
|---|---|---|---|---|
| D3′ D2′ | X | X | X | 0 |
| D3′ D2 | 0 | X | X | 1 |
| D3 D2 | X | X | X | X |
| D3 D2′ | 1 | X | X | X |
The 4th driver signal to the motor is the X-NOR of the data lines D2 and D1 or the complement of X-OR of D2 and D1.
Circuit Diagram

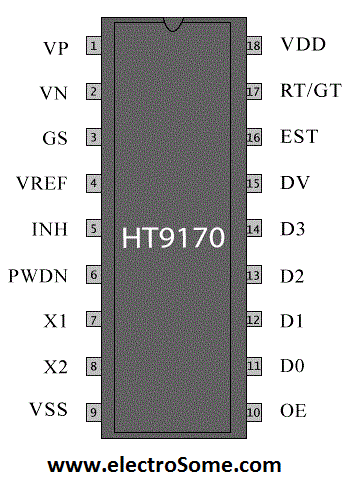
This is the circuit diagram for the cellphone operated rover.The main parts are DTMF decoder,Logic circuits by IC’s and motor drivers. HT9170 IC is used as DTMFdecoder. It is a DTMF receiver integerated with digital decoders and bandsplit filter functions.All typeof HT9170 uses digital counting techniques to detect and decode 16 bit DTMF tone pairs to 4-bit code output.Highly accurate capacitor filters are employed to divide tone signals to high and low group signals.A built in dial tone rejection circuit is provided eliminate the need of prefiltering circuit.It decodes the DTMF tones to corresponding BCD codes.The IC 74HC04 is high speed CMOS hex Inverter (Not gates) and IC 74HC86 high speed CMOS quad XOR gates.These two IC’s forms the logic circuit between decoder and motor driver. Use high speed CMOS ICs only for this circuit other IC would require extra hardware like pull up resistors, etc. The L293D IC is comparator motor driver .It is a quad, high-current, half-H driver designed to provide bidirectional drive currents of up to 600 mA at voltages from 4.5V to 36V , consisting of of four drivers .It makes it easier to drive the DC motors .It is capable of handling the direction of motor easily according to the given logic inputs, this IC can handle up to 18V DC supply without any extra heat sink and 18V-30V with a heat sink. IC 7805 is used as voltage regulator which has 5V output.To interface DTMF signals in the circuit .Get a 3.5mm (or 2.5mm, whichever suits you) audio jack (male part) solder a long enough wire on to it and attach the other open end with the circuit .Connect the wire from the signal out pin(s) to the input end of the coupling capacitor in the circuit (where it reads input from headset), and ground wire of the jack to the circuit ground .For connecting the male jack use female jack in the phone .Don’t use any audio transmitter enhancement of cell phone.
Advantages
- Accurate, Reliable, low cost system
- Working range as large as the coverage area of the service provider
- No interference with other controllers
- DTMF tones if received from external sources,are neglected by amplitude comparison of two tones
- No need of designing a separate transmitter / receiver
- Number of functions may be extended to 12 using simple logic gates.
Applications
- Remote sensing
- Spying
- As a transporting system














hello! sir we cannot find MT88l70 in pcb could u pls tell us from where find it ??
Hello, hope you are doing fine. I was wondering if i can use L293B instead of L293D. Woud that make a major problem? One more thing, the jack for the input signal has three terminals. On which one should i connect?
PINs of 74HC04 are arranged so.. to make the circuit diagram simple… in understanding and drawing..
Sir,isn’t the numbering in Ic74HC04 wrong? Shouldnt we start from the left hand side of the Ic?
You can call from any phone… Put the mobile in rover in auto answer mode… Look at the first table… for keys to be pressed..
Hello Sir, I am sorry, but I didn’t understand that where the keys are to be pressed? In a mobile from which call is made, or in a mobile to which call is made? And also, if I haven’t an option to set on auto answer, Can I receive call immediately for operating rover?
Most problems comes from connecting cellphone with DTMF circuit , people said that’s caused by input impedance value wasn’t appropriate.If still doesn’t work You could also try connecting pin 5 & 6 on HT9170 to ground , replace 300K Ohms with 22K Ohms , and directly input to pin 3 with modifying the input circuit.
So , Cellphone – jack plugged -handsfree’s cable – mic – handsfree’s cable – open wire – DTMF circuit. The wires that open have two different colour , the copper means negative (Ring) and green means input (Tip) and don’t forget to set up your cellphone for auto answer.
first , make sure you get a suitable handsfree for your cellphone. The handsfree always comes with mic , it attached on knob that used for stop conversation. Then cut only the earpiece , and you have two open wires. Remove enamel coating on those wire using matches then solder it to DTMF circuit. On the other side you just connect its jack plug into your cellphone.
What I mean is, how did you get the values for W,X,Y, and Z in the motor driver inputs
I don’t get your question,,, please elaborate..
How did you determine the which is ‘1’ or ‘0’ for the motor driver inputs?
D3 may be treated as don’t care for circuit simplification…
the schematic seems not functional…the D3 input is not connected.
why is D3 not used? I noticed it in the K-Mapping
Note: that is only a circuit diagram, not a pcb design…….. You must place IC properly when design the PCB…….
Sorry, the above image shown above is not the original photo..
here: http://www.youtube.com/watch?v=AJOXu3MRPTY
he used a microcontroller…same rover isn’t it?
Low power consumption, easy construction, wide working voltage range etc..
what is the purpose of the CMOS IC’s? (aside from serving as a link for the L293 and HT9170
Use a 3.5mm jack…
How do you connect the DTMF decoder and the cellphone (with mic)?
ok go ahead… all the best..
Thank you Sir , I have collected all the components , I will using veroboard so I think 74HCO4 will be better soldered under the pcb , so make easier for newbie like me to connecting all wires . the next problem is connecting the handsfree , because they have tiny wires. I heard that we must include mic on the handsfree and cut only the earpieces , then solder it to pcb , and we plug the jack to cellphone. MT8870 can replace HT9170 but some people sad HT9170 is better for this project.
search for another dtms decoder..
I did not find any HT9170 DTMF decoder, are there any substitute IC for that?
Dual Inline Package
I was thinking, what type of L293D and HT9170 were used here? I am planning ot purchase these item and try this project out 😀
It depends upon the structure you are using.
You can buy the structure from robokits.
Do you have the internal diagram of the Rover? Don’t know how to connect the DC motor to the rover…
Why ? Crystal is a commonly available component..
what are the substitute I can make for the crystal?
Pressing “1” during a call makes it move forward..
I press 1A to implement during a call to make it move?
Please refer the first table in this article for keys that to be pressed ………..
No need of recalling…
Using the cellphone as a controller, what keys do I need to press to go left, right, forward, backward and brake? If for example I made a call , how would the functionality continue? do I need to call again? just wondering…quite new to this 🙂
No, it is Crystal….. which is commonly used to make stable oscillators..
Refer this article : http://www.electrosome.com/crystal-oscillator/
Sir, in the schematic diagram, what is the 3.579545MHz component in connected between pins X1 and X2 ? It is the cellphone?
Yes it is in the right place………
Sorry, we don’t have the picture of above project………
But it will work.. one of my friend made this…
Hallo .. Sir , if looking the picture of the rover it seem using a microcontroller , did you have photos with logic gates like the circuit above..? I try to make the pcb lay out but I still confuse with number one pin on 74HC04 ..would you help me please ?
Hello Sir , That’s awesome.. ,I try to buid it .. is 1st pin number on 74HCO4 at that circuit diagram in the right place ? sorry I’m newbie on electronics , but I really want to build it.. thank you